Dans le cadre des cours d’activités complémentaires et d’AFP, nous avons eu l’occasion de rencontrer Anthony Jacques, formateur pour Technobel, qui nous a fait découvrir le robot LEGO Spike. Au cours de cette journée, il nous a parlé du concours “Challenge sans contact” organisé dans le cadre du salon Evolutic. Très motivée, notre classe a décidé de relever ce défi.
Accompagnés par nos professeurs et suite à quelques heures de cours, voici le compte rendu de notre projet.
Étape 1
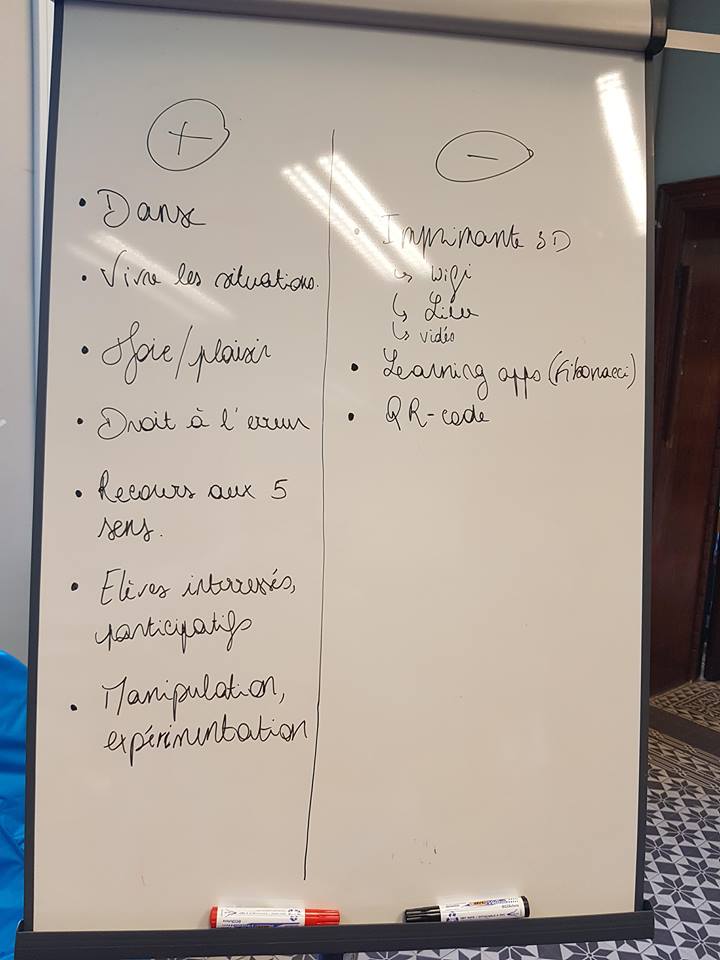
Brainstorming de toutes nos idées.
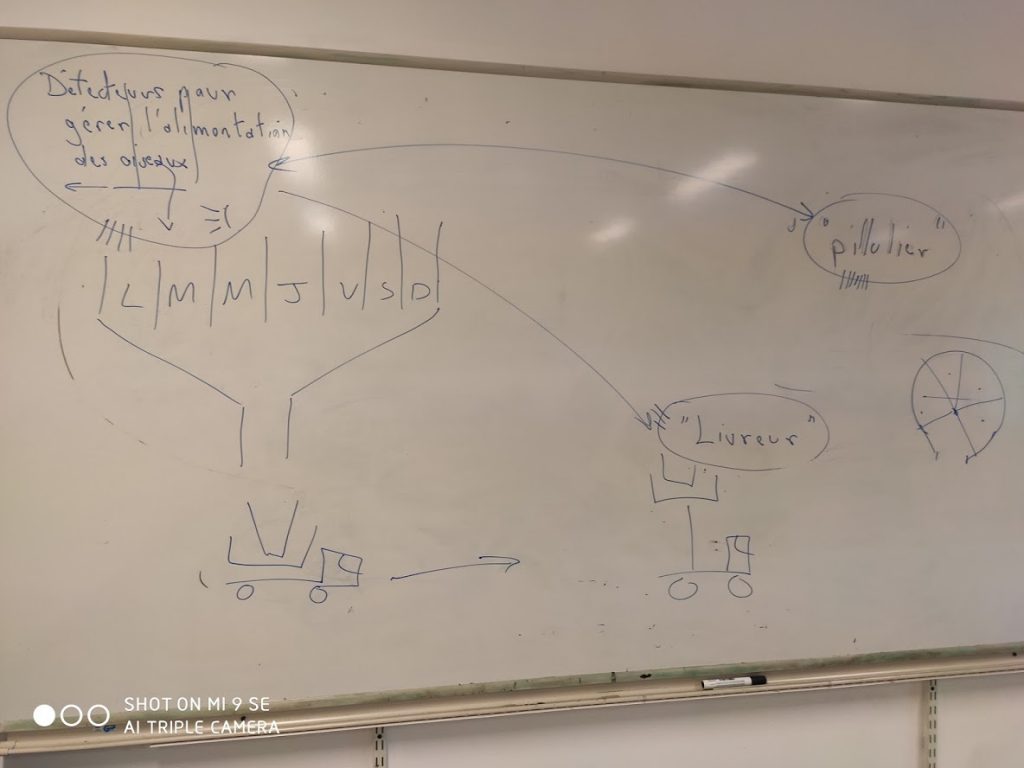
Réalisation de notre projet en combinant les idées ayant récolté le plus de vote. Ces idées étaient :
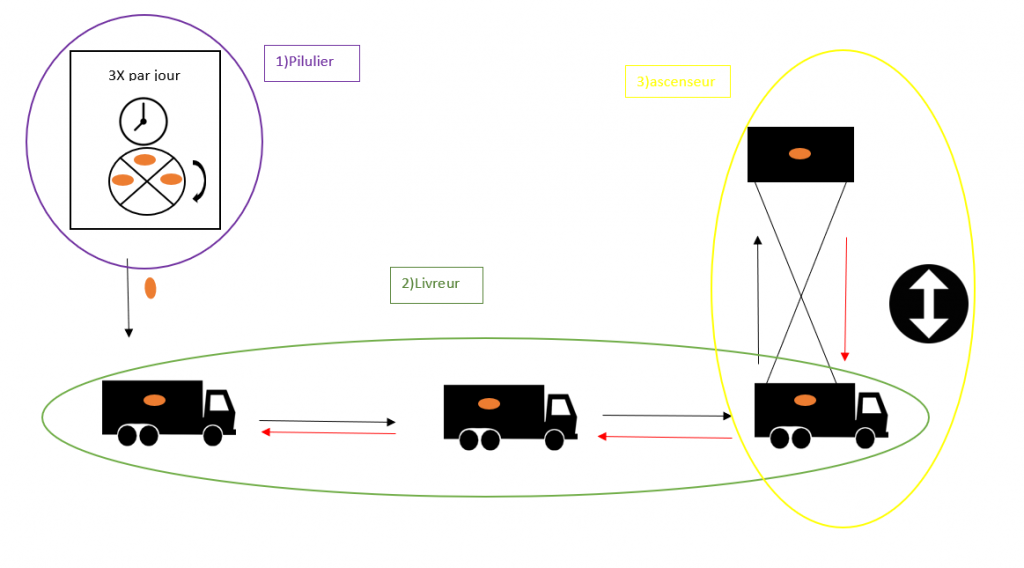
- Pilulier
- Remorque
- Mode de livraison (voiture)
Etape 2
Réflexion sur la manière d’assembler notre robot.
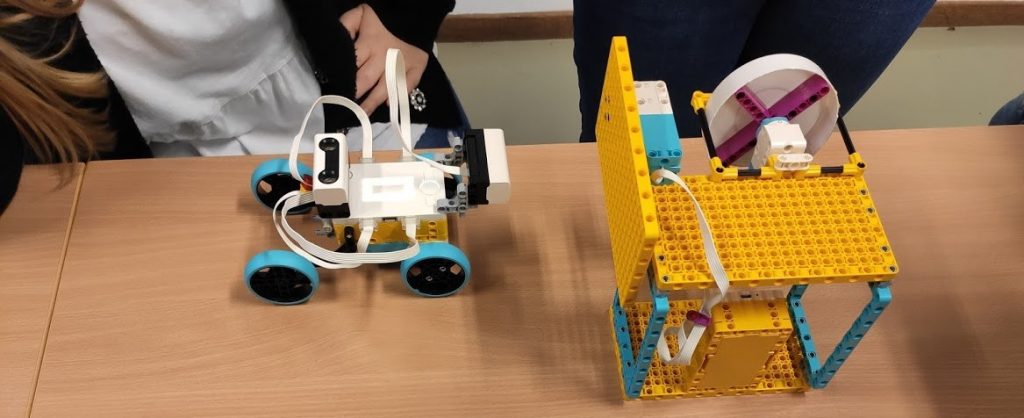
Construction des différentes parties du projet. Un groupe s’est chargé de construire la partie du pilulier, un autre a construit la petite voiture et le dernier s’est occupé de créer la partie élévatrice du récipient.
Programmation des parties en coopération avec les autres groupes.
Etape 3 (1er jet)
Premiers essais de nos projets (peu concluants) ; un manque de précision dans nos manipulations a provoqué un dysfonctionnement dans la mise en place du projet
Deuxième essai ; toujours aussi peu concluant, toujours suite à des erreurs dans les programmations ; le problème du robot a empiré. La solution semble hors de portée.
Troisième essai ; le projet prend vie et commence à fonctionner selon notre objectif. Il y a toujours des problèmes mais nous sommes sur la bonne voie.
Quatrième essai, le projet rempli les fonctions souhaitées mais nous sommes toujours face à un problème au niveau de l’élévateur. Il a fallu ajuster son axe de déplacement.
Cinquième essai ; le problème majeur semble résolu, cela commence à devenir concret.
Etape 4
Montage vidéo de notre film de présentation
Regroupement des photos et vidéos
Etape 5
Rémi se charge de l’écriture du carnet de bord
Mise en forme et correction de l’orthographe
Plan de montage du prototype.
1). Le pilulier
-construire un système en forme de croix pour délimiter les compartiments du pilulier
-choisir un récipient
-customiser le récipient en le trouant afin de ne permettre qu’à la pilule voulue de sortir via le système d’engrenage
-le système de distribution des pilules est cette croix placée dans le récipient
-mettre en place un système de plaque fixée via un moteur rotatif afin de mettre en marche la voiture via l’activation de ses capteurs
-construire une infrastructure maintenant les 2 parties en hauteur, le montage avec la croix doit se placer vers l’extérieur de l’infrastructure pour permettre la chute des pilules

2). La voiture
-brancher 2 moteurs rotatifs sur le module auxquels il faut fixer deux roues sur chacun d’entre eux

-mise en place de 2 capteurs de distance sur le module. L’un activé par le pilulier, l’autre par la personne pour renvoyer la voiture vers le pilulier

3). La remorque
-trouver un moyen pour que le bac monte parallèlement et reste droit
-pour construire les pattes, emboiter deux pièces pour avoir la taille souhaitée et les fixer à une plateforme
-créer un système d’élévation parallèle au sol et pivotant sur un arc de cercle pour faire monter le chariot qui doit contenir la pilule

4). La voiture + la remorque
-trouver un moyen pour assembler le moteur de la voiture à la remorque
-mettre le petit robot sur l’espace vide de la remorque
-placer les roues sous la structure de la remorque
-ajouter les modules de pivot pour gérer le déplacement alourdi par la structure
Programmation.
- Le pilulier
-au démarrage du programme, indiquer que le programme doit fait un bruit et affiche le mot “MATIN”
-programmer le moteur A pour qu’il tourne de 90°
-programmer, après 2secondes, le second moteur pour qu’il tourne de 180°
-programmer une attente de 50 secondes, puis une répétition (1 fois)
-ajouter le même bruit que précédemment
-programmer l’apparition du mot “MIDI”
-programmer, après 2secondes, le second moteur pour qu’il tourne de -180°
-programmer une attente de 50 secondes, puis une répétition (1 fois)
-programmer l’attente de 50 secondes sans oublier la répétition (1 fois)
-programmer le démarrage du même bruit que précédemment
-programmer l’apparition du mot “SOIR”
– programmer, après 2secondes, le second moteur pour qu’il tourne de 180°
-programmer une attente de 50 secondes, puis une répétition (1 fois)
-programmer l’attente de 50 secondes
-fin du programme

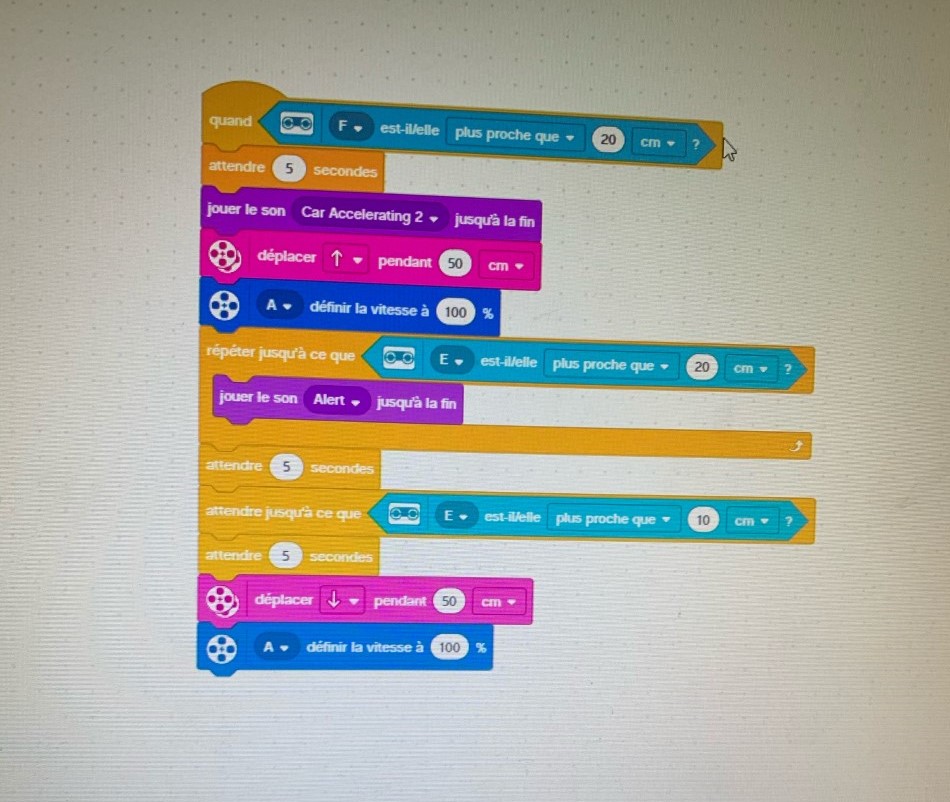
- La voiture
-programmer la voiture pour qu’elle démarre après 5 secondes quand elle capte un mouvement à maximum 20 cm
-programmer un déplacement en ligne droite de 50 cm et avec une vitesse de 100%
-programmer ensuite le déplacement de retour
-programmer un signal sonore après 5 secondes qd la voiture s’arrête
-la voiture redémarre après 5 secondes quand elle capte un mouvement à moins de 10 cm
-programmer un déplacement en sens inverse que précédemment
-programmer une vitesse de 100%
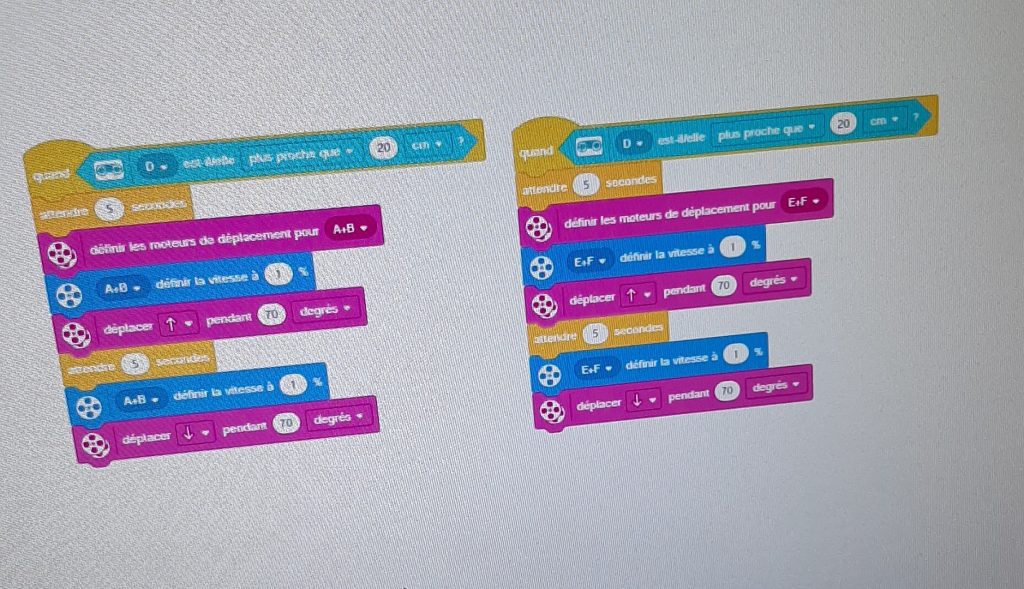
- La remorque
-programmer un capteur de mouvement à maximum 20 cm
-programmer un délai de 5 secondes
-programmer une rotation de 70° vers le haut des 2 moteurs sur la remorque à vitesse 1%
-programmer un délai de 5 secondes
-programmer une rotation de 70° vers le bas des 2 moteurs à vitesse 1%
-répéter cette programmation pour les 2 autres moteurs




























 et méritée de par leur défaite de la matinée, durant le temps de midi, l’après-midi fut chargée : collage des fiches sur les plaques en bois pour le carré géométrique, fabrication de ce carré, préparation du kit de fabrication pour les élèves, établissement des étapes de fabrication et répartition des élèves de 3e dans les différents groupes.
et méritée de par leur défaite de la matinée, durant le temps de midi, l’après-midi fut chargée : collage des fiches sur les plaques en bois pour le carré géométrique, fabrication de ce carré, préparation du kit de fabrication pour les élèves, établissement des étapes de fabrication et répartition des élèves de 3e dans les différents groupes. verte se déroulait la matinée. Les étudiants se sont placés par groupes dans la classe et y ont accueilli les élèves. Ceux-ci ont visionné les webdocumentaires chacun sur une tablette. Pour accéder au site, ils devaient scanner un QR code. Les étudiants de la Haute Ecole se sont alors fortement étonnés de constater que les
verte se déroulait la matinée. Les étudiants se sont placés par groupes dans la classe et y ont accueilli les élèves. Ceux-ci ont visionné les webdocumentaires chacun sur une tablette. Pour accéder au site, ils devaient scanner un QR code. Les étudiants de la Haute Ecole se sont alors fortement étonnés de constater que les  élèves étaient bien meilleurs en informatique que ce à quoi ils s’attendaient. Le visionnage des webdocumentaires a duré environ une heure : les élèves ont pu découvrir 4 à 5 anciens instruments de mesure, comprendre leur fonctionnement, leur origine et leur justification mathématique. Ce visionnage leur a permis de construire ensuite le carré géométrique.
élèves étaient bien meilleurs en informatique que ce à quoi ils s’attendaient. Le visionnage des webdocumentaires a duré environ une heure : les élèves ont pu découvrir 4 à 5 anciens instruments de mesure, comprendre leur fonctionnement, leur origine et leur justification mathématique. Ce visionnage leur a permis de construire ensuite le carré géométrique. onde partie de la matinée, tous se sont rendus dans le parc de Gembloux pour mesurer la hauteur des arbres et des bâtiments grâce à leur construction et à la croix du bûcheron.
onde partie de la matinée, tous se sont rendus dans le parc de Gembloux pour mesurer la hauteur des arbres et des bâtiments grâce à leur construction et à la croix du bûcheron.