Dans le cadre des cours d’activités complémentaires et d’AFP, nous avons eu l’occasion de rencontrer Anthony Jacques, formateur pour Technobel, qui nous a fait découvrir le robot LEGO Spike. Au cours de cette journée, il nous a parlé du concours “Challenge sans contact” organisé dans le cadre du salon Evolutic. Très motivée, notre classe a décidé de relever ce défi.
Accompagnés par nos professeurs et suite à quelques heures de cours, voici le compte rendu de notre projet.
Étape 1
Brainstorming de toutes nos idées.
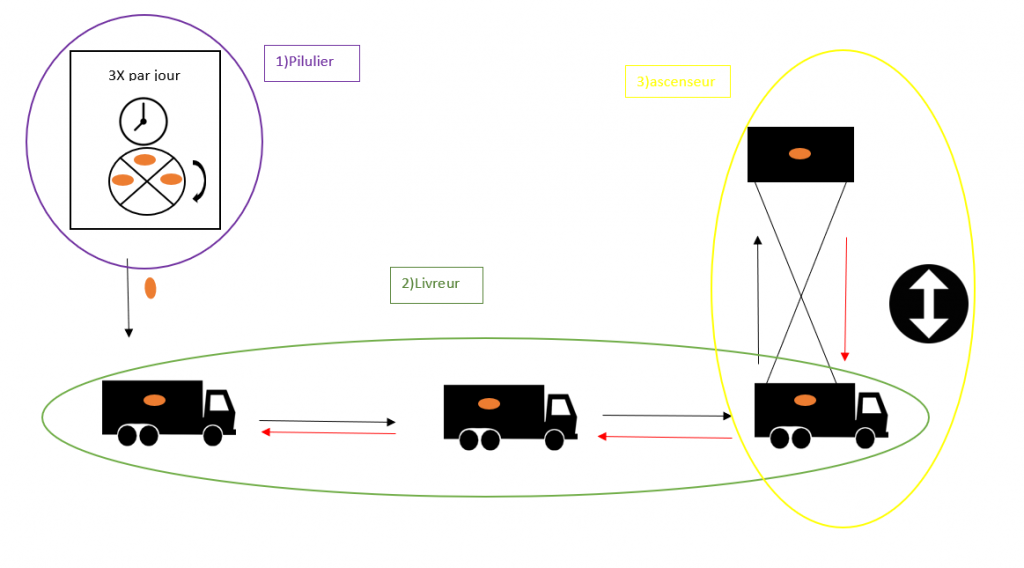
Réalisation de notre projet en combinant les idées ayant récolté le plus de vote. Ces idées étaient :
- Pilulier
- Remorque
- Mode de livraison (voiture)
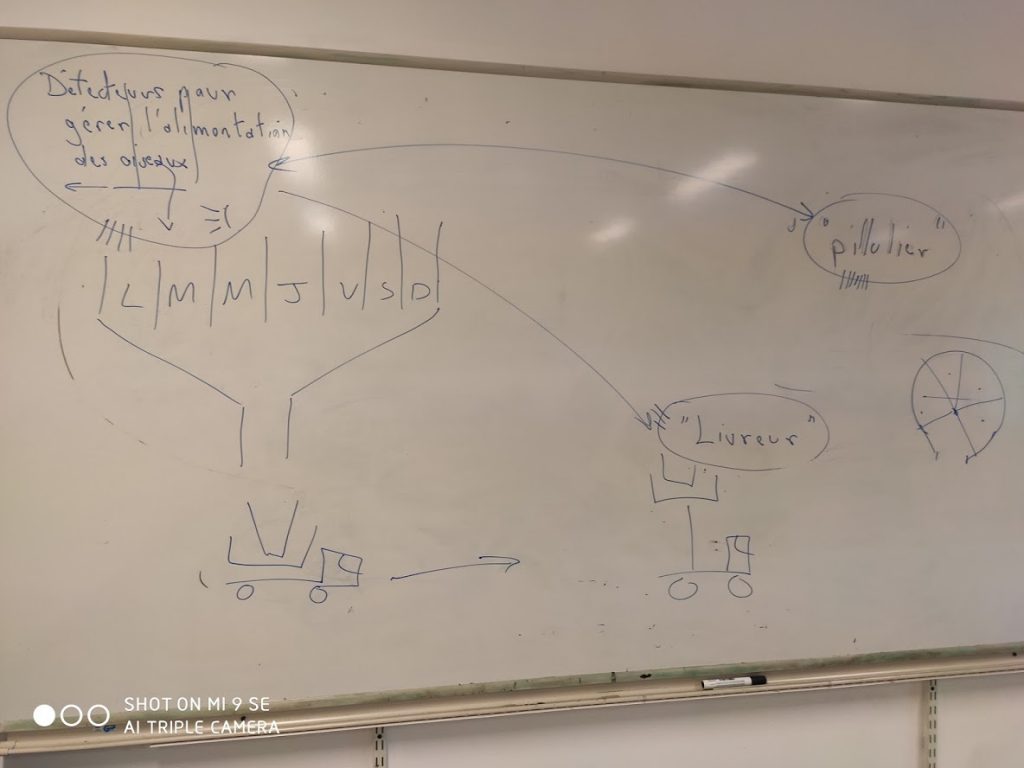
Etape 2
Réflexion sur la manière d’assembler notre robot.
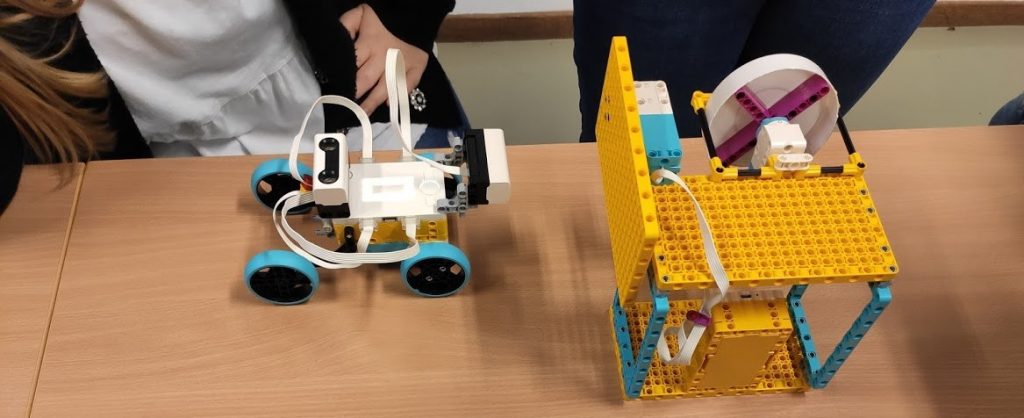
Construction des différentes parties du projet. Un groupe s’est chargé de construire la partie du pilulier, un autre a construit la petite voiture et le dernier s’est occupé de créer la partie élévatrice du récipient.
Programmation des parties en coopération avec les autres groupes.
Etape 3 (1er jet)
Premiers essais de nos projets (peu concluants) ; un manque de précision dans nos manipulations a provoqué un dysfonctionnement dans la mise en place du projet
Deuxième essai ; toujours aussi peu concluant, toujours suite à des erreurs dans les programmations ; le problème du robot a empiré. La solution semble hors de portée.
Troisième essai ; le projet prend vie et commence à fonctionner selon notre objectif. Il y a toujours des problèmes mais nous sommes sur la bonne voie.
Quatrième essai, le projet rempli les fonctions souhaitées mais nous sommes toujours face à un problème au niveau de l’élévateur. Il a fallu ajuster son axe de déplacement.
Cinquième essai ; le problème majeur semble résolu, cela commence à devenir concret.
Etape 4
Montage vidéo de notre film de présentation
Regroupement des photos et vidéos
Etape 5
Rémi se charge de l’écriture du carnet de bord
Mise en forme et correction de l’orthographe
Plan de montage du prototype.
1). Le pilulier
-construire un système en forme de croix pour délimiter les compartiments du pilulier
-choisir un récipient
-customiser le récipient en le trouant afin de ne permettre qu’à la pilule voulue de sortir via le système d’engrenage
-le système de distribution des pilules est cette croix placée dans le récipient
-mettre en place un système de plaque fixée via un moteur rotatif afin de mettre en marche la voiture via l’activation de ses capteurs
-construire une infrastructure maintenant les 2 parties en hauteur, le montage avec la croix doit se placer vers l’extérieur de l’infrastructure pour permettre la chute des pilules

2). La voiture
-brancher 2 moteurs rotatifs sur le module auxquels il faut fixer deux roues sur chacun d’entre eux

-mise en place de 2 capteurs de distance sur le module. L’un activé par le pilulier, l’autre par la personne pour renvoyer la voiture vers le pilulier

3). La remorque
-trouver un moyen pour que le bac monte parallèlement et reste droit
-pour construire les pattes, emboiter deux pièces pour avoir la taille souhaitée et les fixer à une plateforme
-créer un système d’élévation parallèle au sol et pivotant sur un arc de cercle pour faire monter le chariot qui doit contenir la pilule

4). La voiture + la remorque
-trouver un moyen pour assembler le moteur de la voiture à la remorque
-mettre le petit robot sur l’espace vide de la remorque
-placer les roues sous la structure de la remorque
-ajouter les modules de pivot pour gérer le déplacement alourdi par la structure
Programmation.
- Le pilulier
-au démarrage du programme, indiquer que le programme doit fait un bruit et affiche le mot “MATIN”
-programmer le moteur A pour qu’il tourne de 90°
-programmer, après 2secondes, le second moteur pour qu’il tourne de 180°
-programmer une attente de 50 secondes, puis une répétition (1 fois)
-ajouter le même bruit que précédemment
-programmer l’apparition du mot “MIDI”
-programmer, après 2secondes, le second moteur pour qu’il tourne de -180°
-programmer une attente de 50 secondes, puis une répétition (1 fois)
-programmer l’attente de 50 secondes sans oublier la répétition (1 fois)
-programmer le démarrage du même bruit que précédemment
-programmer l’apparition du mot “SOIR”
– programmer, après 2secondes, le second moteur pour qu’il tourne de 180°
-programmer une attente de 50 secondes, puis une répétition (1 fois)
-programmer l’attente de 50 secondes
-fin du programme

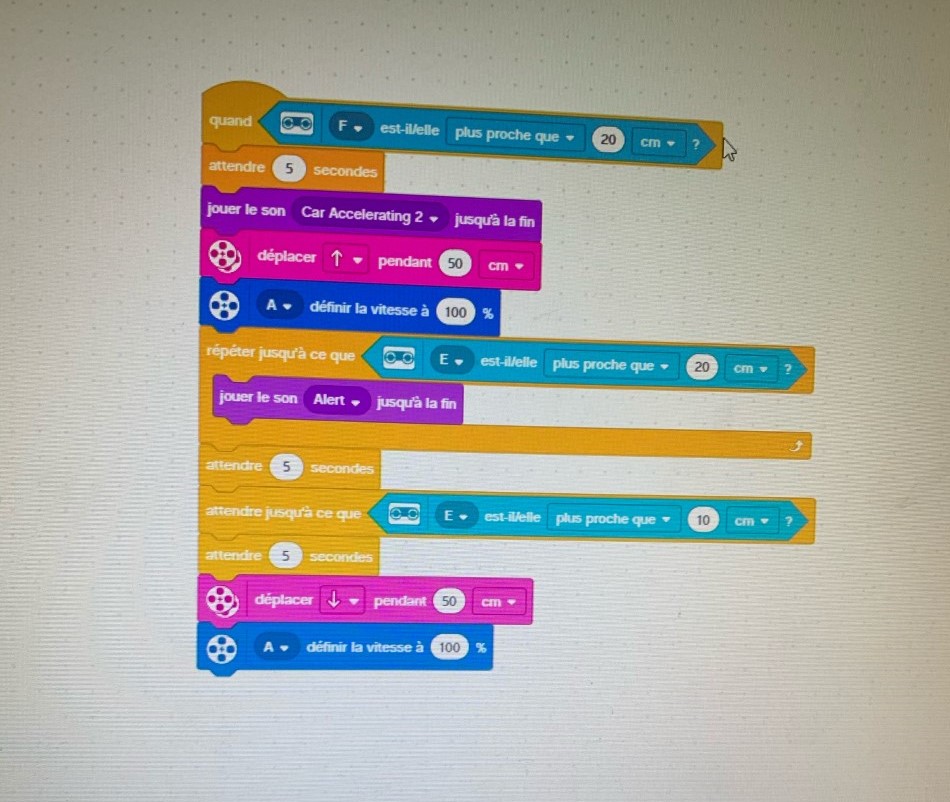
- La voiture
-programmer la voiture pour qu’elle démarre après 5 secondes quand elle capte un mouvement à maximum 20 cm
-programmer un déplacement en ligne droite de 50 cm et avec une vitesse de 100%
-programmer ensuite le déplacement de retour
-programmer un signal sonore après 5 secondes qd la voiture s’arrête
-la voiture redémarre après 5 secondes quand elle capte un mouvement à moins de 10 cm
-programmer un déplacement en sens inverse que précédemment
-programmer une vitesse de 100%
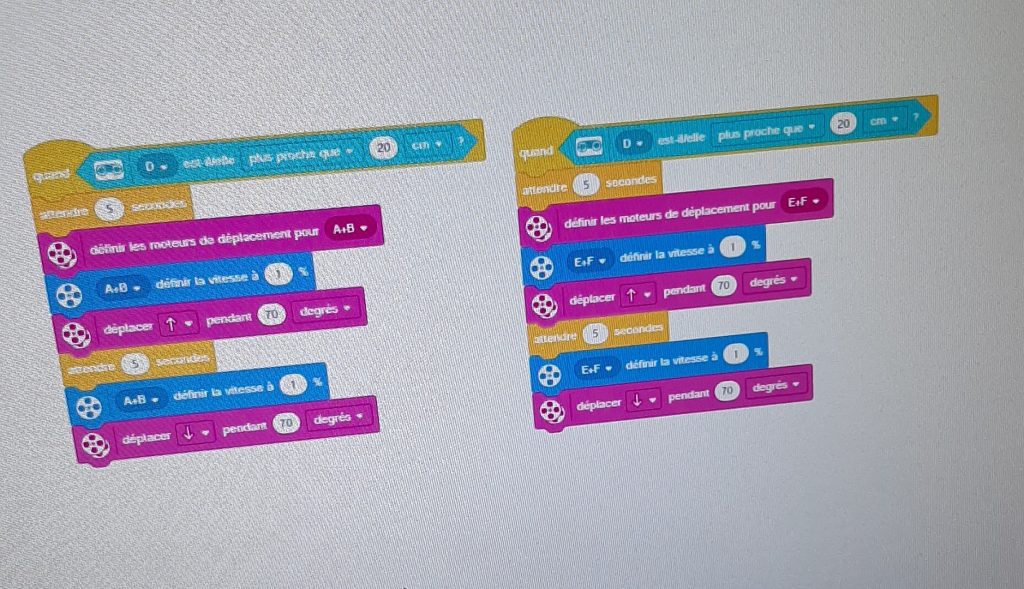
- La remorque
-programmer un capteur de mouvement à maximum 20 cm
-programmer un délai de 5 secondes
-programmer une rotation de 70° vers le haut des 2 moteurs sur la remorque à vitesse 1%
-programmer un délai de 5 secondes
-programmer une rotation de 70° vers le bas des 2 moteurs à vitesse 1%
-répéter cette programmation pour les 2 autres moteurs